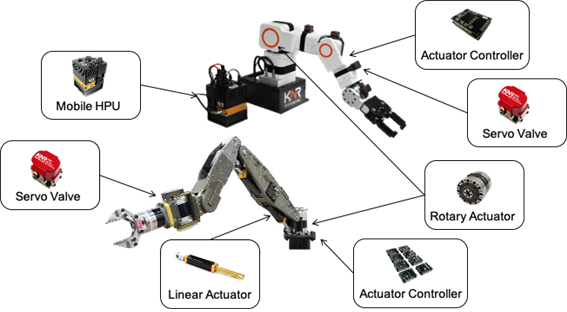
유압 로봇을 구성하기 위해서 변위와 힘을 발생하는 것이 액추에이터 입니다. 모터기반 로봇과 비교하여 구동원인 모터대신 사용되는 것이라 할 수 있으며, 모터 구동로봇은 모터에 감속기를 부착하여 사용하여야 하지만 유압로봇은 유압 액추에이터 하나로 구성됩니다. 로봇용 유압 액추에이터는 모터에 비하여 같은 부피당 약9~10배 정도의 큰 힘을 발생할 수 있으며, 고온, 수중, 방사능 등 극한 환경에서도 유용하게 사용할 수 있는 장점을 가지고 있습니다. 유압 액추에이터는 동작 형태에 따라서 리니어 액추에이터와 로터리 액추에이터로 분류할 수 있으며 사용 용도에 따라 적절하게 선택하여 사용할 수 있습니다
리니어 액추에이터는 마치 굴삭기의 피스톤 구조와 유사한 형태를 띄고 있어 직선운동을 할 수 있고 크기대비 비교적 큰 힘을 낼 수 있지만 로봇용으로 사용하기 위해서는 직선 운동을 회전운동으로 다시 만들어 주어야 하는 단점이 있습니다.
KNR Systems의 리니어 액추에이터는 ‘폴리머 코팅 기술’을 적용한 저마찰 액추에이터를 특징으로 하고있어 우수한 제어특성을 만들어낼 수 있습니다. 액추에이터에 적용된 KNR Systems의 ‘폴리머 코팅기술’은 ‘실링’ 타입과는 비교할 수 없는 유연성과 내구성을 보장하는 작동 성능을 보유하고 있으며, 세계적인 경쟁 업체들의 bonding 타입 등에 비해서도 월등히 우수한 액추이이터의 효율성을 보여줍니다.
로터리 액추에이터는 직선운동의 변환없이 로봇 관절에 바로 부착하여 매우 컴팩트한 구성으로 구현할 수 있으나, 일반적으로 고가이고 내부 구조 특성상 원하지 않는 마찰력이 더 발생된다는 점이 성능상의 단점입니다.
KNR Systems의 로터리 액추에이터는 로봇관절 구성을 위해 적합한 베어링을 일체화하고 있으며, 센서와 제어기도 스마트 액추에이터 형태로 내장할 수 있도록 개발되어 있습니다. 특히 로봇을 구성할 수 있을만큼 충분히 경량(동일 기어모터 대비 약 10%, 기존 유압 로터리 액추에이터 대비 50%), 소형이며 제어성능에 큰 영향을 미치는 내부 마찰력도 극도로 낮추었습니다.
최근 Boston Dynamics에서 KNR Systems의 로터리 액추에이터를 사용하여 성능 평가를 진행하고 있으며, 신제품의 더 낮춰진 마찰력의 실험결과의 공유를 요청하는 등 그 기술력을 간접적으로 입증하고 있습니다. (독보적인 베인형 로봇 관절용 로터리 액추에이터는 세계 선도 유압로봇기업인 미국 Boston Dynamics와 유럽 IIT 연구소등에서 본사의 액추에이터로 양산성 적용평가 및 다년간 본사의 액추에이터를 사용한 로봇을 만들고 있습니다.)
2020년에는 KNR Systems 내에서 생산할 수 있는 제조법을 개발완료 하였고, 가공 장비를 구축하여 제품원가를 작년대비 최소 50% 절감할 수 있을 것으로 추정하고 있습니다.