The hydraulic components for the robot can be divided into five basic components (modules), including (1) hydraulic actuator, (2) servo valves, (3) various sensors, (4) controllers, and (5) hydraulic power units (HPU) depending on their function and role. These components can be combined to develop hydraulic robot arms or mobile platforms. Explain each configuration module to the hydraulic robot arm of KNR Systems as follows.
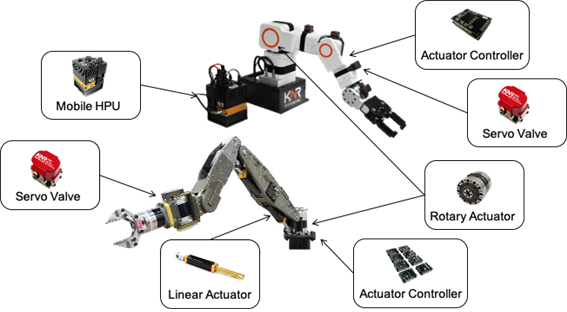
1. Hydraulic actuator - Rotary actuator or Linear actuator
The actuator generates displacement and force to construct the hydraulic robot. Compared to motor-based robots, the driving cause is not a motor.
This can be said to be used, the motor driven robot must be used with a moderator attached to the motor, but the hydraulic robot consists of a hydraulic actuator.
The hydraulic actuators for the robot can generate about 9 to 10 times as much power per volume as motors, and have the advantage of being useful in extreme environments such as high temperatures, water and radioactivity.
The hydraulic actuators can be classified into linear actuators and rotary actuators depending on their behavior and can be selected and used appropriately for their intended use.


Rotary actuators can be attached directly to the robot joints without the conversion of linear motion, which generally results in more expensive and internal friction due to the nature of the structure.
KNR Systems’ rotary actuator incorporates a suitable bearing for the robot joint construction, and the sensor and controller are also developed to be built into the form of smart actuators. In particular, the internal friction, which is small and has a significant impact on control performance, has been extremely low, especially with sufficient light to construct the robot (approximately 10% compared to the same gear motor and 50% compared to conventional hydraulic rotary actuators).
Boston Dynamics has recently conducted a performance evaluation using KNR Systems’ rotary actuator, and indirectly proves its technical skills by requesting the sharing of the lower friction test results of the new product. (The world’s leading hydraulic robot company Boston Dynamics in the U.S. and the European IIT are building robots that use the our actuators for mass production and multi-year applications.) In 2020, we have developed manufacturing methods that can be produced within KNR Systems, and we estimate that we will be able to reduce product costs by at least 50% compared to last year by building processing equipment.